Mini Pi 데모 매뉴얼 개요
이 매뉴얼은 NPU 기반의 Mini Pi 이족보행 로봇이 제공하는 주요 데모들의 실행 방법 및 관련 설정 정보를 안내합니다. 로봇의 강력한 연산 능력과 Linux OS 환경을 활용하는 세 가지 핵심 데모에 대한 상세 지침을 제공합니다.
각 기능에서 사용되는 노드와 토픽에 관한 간략한 관계를 아래 그래프로 나타냈습니다. 자세한 분석, 코드 수정을 위해서는 프로젝트 패키지를 분석하여야 합니다. 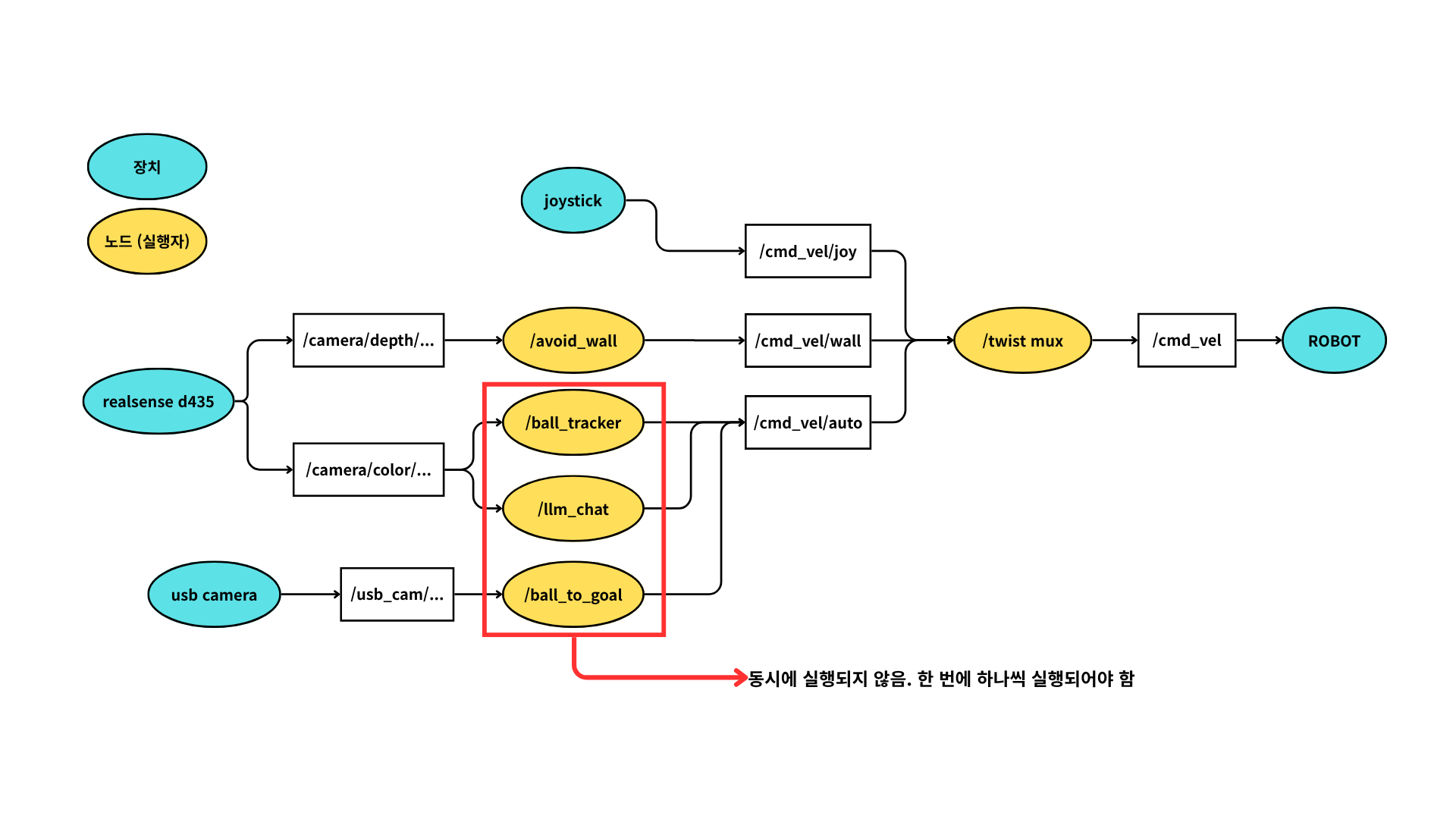
🚀 주요 데모 소개
1. 공 추적하기 (Ball Tracking)
로봇이 시각 정보를 활용하여 주변 환경에서 공을 인식하고 지속적으로 추적하는 데모입니다.
- 실행: NoMachine을 이용한 일반 GUI 또는 웹 GUI 접속을 통해
twist_mux,avoid_wall,ball_tracking등의 항목을 재생하여 실행합니다. - 커스텀 가이드: 기존 알고리즘의 성능이 만족스럽지 않을 경우, 사용 환경에 맞게 공 데이터셋을 수집하고 YOLO 학습을 수행한 후, 학습된
.pt모델을 RK3588 NPU에서 사용할 수 있는.rknn파일로 변환하여 적용하는 상세 과정을 제공합니다.
2. 공 골대 넣기 (Kick Ball to Goal)
공을 인식한 후 지정된 골대에 정확하게 차 넣는 데모 실행 방법을 안내합니다.
- 실행: GUI 환경에서
twist_mux,yolo_detect_efficient등의 항목을 재생하여 로봇이 목표를 수행하도록 합니다.
3. LLM을 통한 물건 찾기 (Object Finding via LLM)
LLM(대규모 언어 모델) 기반의 채팅 GUI를 통해 사용자와 로봇이 상호작용하며 특정 물건을 찾거나 작업을 수행하는 데모입니다.
- 실행: GUI에서
twist_mux와using_llm항목을 재생하여 LLM 기반 채팅 인터페이스를 활성화할 수 있으며, 사용자의 입력에 따라 LLM이 답변합니다. 답변 출력에 약 5~10초의 시간이 소요될 수 있습니다.
💻 데모 공통 실행 환경
모든 데모는 다음 단계를 통해 시작할 수 있습니다.
- 새 터미널에서
source ~/.bashrc를 입력하여 단축어를 로드합니다. soccer_ws와roboworld_gui를 차례로 입력하여 GUI 창을 띄웁니다.- 웹 GUI 접속을 통해 실행하는 방법도 지원됩니다.