로봇 이동 제어 : twist_mux 활용 가이드
로봇을 원하는 대로 정교하게 이동시키기 위해, 우리는 /cmd_vel 토픽을 통해 로봇의 선속도(linear velocity)와 각속도(angular velocity)를 발행합니다. 이 /cmd_vel 메시지는 로봇에게 "지금 어느 방향으로 얼마나 빨리 가고, 얼마나 빠르게 회전해야 하는지"를 지시합니다.
twist_mux 사용 이유: 제어 명령의 충돌 방지
mini pi 로봇의 움직임을 관리하는 /sim2real_master_node는 /cmd_vel을 받아 관절 움직임으로 변환합니다.
다중 소스 제어의 문제점
기존에는 /cmd_vel이 조이스틱에서만 발행되었지만, 이제는 카메라 기반 장애물 회피와 같은 자율 기능에서도 이 토픽을 발행해야 합니다.
충돌 문제: 하나의 토픽(/cmd_vel)에 조이스틱 노드와 자율 주행 노드가 동시에 서로 다른 속도 명령을 발행하면, 로봇은 어떤 값을 따라야 할지 혼란을 겪게 되어 움직임이 이상해지거나 버벅거리게 됩니다.
표준화 문제: /cmd_vel은 mini pi뿐만 아니라 다른 다양한 로봇들의 이동에 사용되는 ROS 표준 토픽입니다. mini pi만을 위해 다른 메시지 형식을 지정하는 것은 재사용성과 확장성 측면에서 적합하지 않습니다.
twist mux의 역할
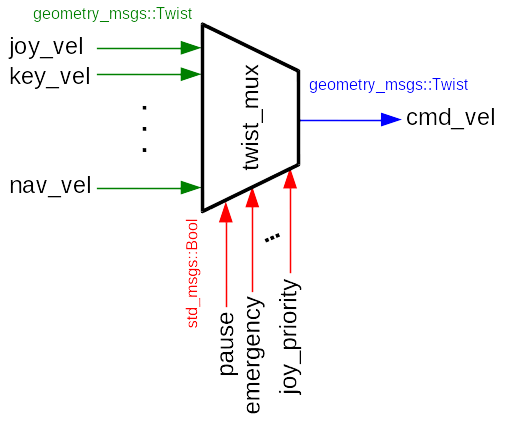
이러한 문제를 해결하기 위해 twist_mux (Twist Multiplexer)를 사용합니다. twist mux는 여러 소스(조이스틱, 자율 주행, 키보드 등)에서 들어오는 cmd_vel 명령 중 상황에 따라 적절한 하나의 명령을 선택하여 로봇에게 전달합니다. 이를 통해 명령 충돌 없이 로봇을 제어할 수 있습니다.
twist mux는 우선순위(priority)와 타임아웃(timeout) 설정을 통해 여러 동작 제어 중 가장 적합한 하나를 선택하여 최종 /cmd_vel로 발행하게 됩니다.
토픽 발행 실습: twist_mux 전후 비교
다음은 /cmd_vel 토픽을 발행하여 로봇을 이동시키는 실습입니다.
- twist mux를 사용하지 않을 때 (충돌 발생)
아래 코드를 입력하고 실행을 해보면, 기존 조이스틱만으로 이동할 때 보다 소음이 많고, 버벅거리는 것을 확인할 수 있습니다.
# /home/hightorque/soccer_ws/twist_mux_lab.py
import rospy
from geometry_msgs.msg import Twist
class MiniPiGo:
def __init__(self):
rospy.init_node('mini_pi_controller', anonymous=True)
self.pub=rospy.Publisher("/cmd_vel", Twist, queue_size=10)
self.cmd_vel=Twist()
self.cmd_vel.linear.x = 0.5
rospy.Timer(rospy.Duration(0.1), self.go_forward)
def go_forward(self, event=None):
self.pub.publish(self.cmd_vel)
if __name__ == "__main__":
node=MiniPiGo()
rospy.spin()이를 실행하기 위해서는, 확인할 것이 한 가지 있습니다.
sim2real_master/install/share/sim2real_master/joy_footstep.yaml에서
# sim2real_master/install/share/sim2real_master/joy_footstep.yaml
teleop:
walk:
type: topic
message_type: geometry_msgs/Twist
topic_name: cmd_vel/joy
...위 부분의 topic_name이 cmd_vel인지 확인하여 주세요.
이후 아래 명령어를 터미널에 입력해주세요.
python3 /home/hightorque/soccer_ws/twist_mux_lab.py이제, 아래 명령어를 통해 /cmd_vel로 들어가는 노드들을 확인해 봅시다.
rqt_graph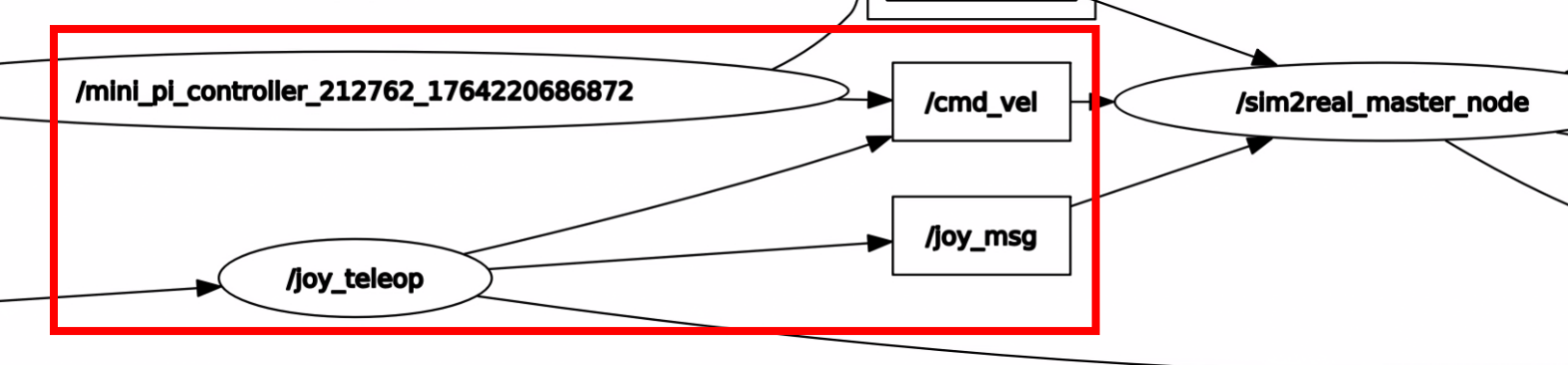 /cmd_vel에 두 개의 노드가 publish로 연결되어있음을 확인할 수 있습니다.
/cmd_vel에 두 개의 노드가 publish로 연결되어있음을 확인할 수 있습니다. 아래와 같이 /cmd_vel 토픽의 값을 출력해 보면 linear.x값이 매 순간 변하는 것을 알 수 있습니다. 이는 결국 mini pi의 움직임을 부자연스럽게 합니다. 이 경우에는, 조이스틱과 코드에서 보내는 값이 모두 /cmd_vel로 전달되기 때문에 어떤 것이 조이스틱으로부터 온 명령인지, 코드에서 온 명령인지 구분할 수 없습니다.
rostopic echo /cmd_vel
---
linear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.24304908514022827
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.3978261351585388
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.6
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0- twist mux를 사용하여 로봇 이동시키기
동일한 코드를 사용합니다. 하지만, publish에서 차이가 있습니다.
# /home/hightorque/soccer_ws/twist_mux_lab.py
import rospy
from geometry_msgs.msg import Twist
class MiniPiGo:
def __init__(self):
rospy.init_node('mini_pi_controller', anonymous=True)
self.pub=rospy.Publisher("/cmd_vel/lab", Twist, queue_size=10)
self.cmd_vel=Twist()
self.cmd_vel.linear.x = 0.5
rospy.Timer(rospy.Duration(0.1), self.go_forward)
def go_forward(self, event=None):
self.pub.publish(self.cmd_vel)
if __name__ == "__main__":
node=MiniPiGo()
rospy.spin()sim2real_master/install/share/sim2real_master/joy_footstep.yaml에서
# sim2real_master/install/share/sim2real_master/joy_footstep.yaml
teleop:
walk:
type: topic
message_type: geometry_msgs/Twist
topic_name: cmd_vel/joy
...위 부분의 topic_name이 cmd_vel/joy인지 확인하여 주세요.
이후, soccer_ws/src/wego_twist_mux/config/twist_mux_lab.yaml에서 아래와 같이 설정되었는지 확인하세요.
# soccer_ws/src/wego_twist_mux/config/twist_mux_lab.yaml
topics:
- name: joystick
topic: /cmd_vel/joy # 조이스틱
timeout: 0.15
priority: 80
- name: lab
topic: /cmd_vel/lab # 조이스틱
timeout: 0.15
priority: 90
locks:
- name: estop
topic: /twist_mux/lock # std_msgs/Bool
timeout: 0.0 # 잠금은 타임아웃 없음
priority: 255 # 최상위 = 잠기면 무조건 정지 유지아래 명령어들을 터미널에 각각 입력해주세요
$ roslaunch wego_twist_mux twist_mux_lab.launch$ python3 /home/hightorque/soccer_ws/twist_mux_lab.py훨씬 자연스럽게 움직이는 것을 확인할 수 있습니다.
마찬가지로 rqt_graph를 통해 확인해 보면, /cmd_vel/joy와 /cmd_vel/lab이 twist_mux를 거쳐 결국 하나의 /cmd_vel로 전달됨을 확인할 수 있습니다.
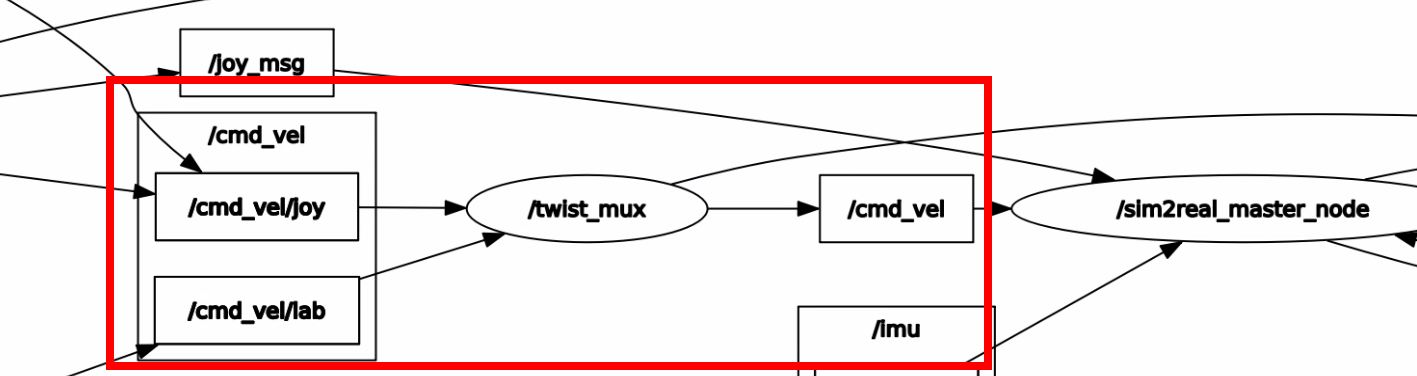
rqt graph에서와 같이 조이스틱은 /cmd_vel/joy로, 코드는 /cmd_vel/lab으로 값을 전송하기 때문에 각각의 값을 확인할 수 있습니다.
rostopic echo /cmd_vel/joy
---
linear:
x: 0.40281829833984373
y: 0.10324861407279969
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.40281829833984373
y: 0.09326424300670623
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.40281829833984373
y: 0.08827206194400787
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0rostopic echo /cmd_vel/lab
---
linear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0twist_mux_lab.yaml 파일에서는 /cmd_vel/lab의 우선순위를 더 높게 했기 때문에 /cmd_vel/lab의 값이 최종적으로 /cmd_vel에 나타납니다.
rostopic echo /cmd_vel
---
linear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
---
linear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0실습: 터미널에서 키보드로 로봇 이동시키기
아래 teleop_key.py 코드를 실행해주세요.
# /home/hightorque/soccer_ws/teleop_key.py
import rospy
from geometry_msgs.msg import Twist
import sys, select, termios, tty
def get_key_non_blocking():
"""키보드에서 문자를 입력받되, 기다리지 않습니다."""
# sys.stdin을 읽을 준비가 되었는지 0초 동안 확인
# (즉, 블로킹 없이 바로 확인)
if select.select([sys.stdin], [], [], 0.0)[0]:
return sys.stdin.read(1)
return None
class MiniPiTeleop:
def __init__(self):
rospy.init_node('mini_pi_keyboard_controller', anonymous=True)
self.pub = rospy.Publisher("/cmd_vel/lab", Twist, queue_size=10)
self.cmd_vel = Twist()
self.rate = rospy.Rate(10)
def run(self):
settings = termios.tcgetattr(sys.stdin)
print("=======================================")
print("W: Forward (+0.5 m/s)")
print("S: Backward (-0.5 m/s)")
print("A: Turn Left (+0.3 rad/s)")
print("D: Turn Right (-0.3 rad/s)")
print("Any other key or no key: STOP")
print("P: Quit")
print("=======================================")
try:
# 터미널 설정을 즉시 입력받는 모드로 변경 (Enter 불필요)
tty.setraw(sys.stdin.fileno())
while not rospy.is_shutdown():
key = get_key_non_blocking()
# 매 루프마다 속도 초기화
self.cmd_vel.linear.x = 0.0
self.cmd_vel.angular.z = 0.0
if key == 'w': # 앞
self.cmd_vel.linear.x = 0.3
elif key == 's': # 뒤
self.cmd_vel.linear.x = -0.3
elif key == 'a': # 좌회전
self.cmd_vel.angular.z = 0.4
elif key == 'd': # 우회전
self.cmd_vel.angular.z = -0.4
elif key == 'p': # 종료
rospy.loginfo("Quit Teleoperation.")
break
self.pub.publish(self.cmd_vel)
self.rate.sleep()
except Exception as e:
rospy.logerr(f"An error occurred: {e}")
finally:
self.cmd_vel.linear.x = 0
self.cmd_vel.angular.z = 0
self.pub.publish(self.cmd_vel)
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
if __name__ == "__main__":
node = MiniPiTeleop()
node.run()아래 명령어들을 터미널에 각각 입력해주세요.
$ roslaunch wego_twist_mux twist_mux_lab.launch$ python3 /home/hightorque/soccer_ws/teleop_key.pyw, s로 앞/뒤 선속도를, a, d로 좌/우 회전 각속도를 실행할 수 있습니다.
실습 문제
/cmd_vel의 다양한 파라미터 값을 변화함에 따라 로봇에 어떤 변화가 나타나는지 확인해보세요
예시:
- linear.x < 0일 때 : 로봇이 뒤로 이동한다
- 0 < linear.x <= 1.0 : 로봇이 앞으로 이동하는데, 그 값이 커질 수록 발걸음 소리도 커진다